Communication via the RS-485 Interface
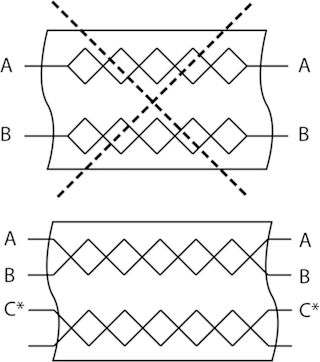

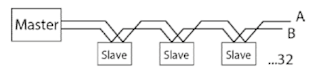
If it is necessary to network economical measuring devices with each other, the RS485 interface with Modbus RTU protocol remains the benchmark. The simple topology configuration, the lack of sensitivity to EMC interference and the open protocol have been outstanding features of the combination of RS485 and Modbus RTU protocol for years. The full name of the RS485 standard is TIA / EIA-485-A. The most recent update was in March 1998 and the standard was confirmed in 2003 without changes. The standard only defines the electrical interface conditions of the sender and receiver, it does not say anything about the topology or the lines to be used. This information can either be found in the TSB89 "Application Guidelines for TIA / EIA-485-A" or in the application descriptions of the RS485 driver module manufacturers, such as Texas Instruments or Maxim. According to the OSI model (Open Systems Interconnection Reference Model)* only the "physical layer" and not the protocol is described. The protocol used may be selected on an arbitrary basis, e.g. Modbus RTU, Profibus, BACnet etc. The communication between the sender and receiver takes place on a wired basis via shielded, twisted pair cable. One cable pair should only ever be used here for A and B (Fig.: Image 1b). If the interface is not galvanically separated then the common connection must also be routed with it (Fig.: Image 1b). More on this later.
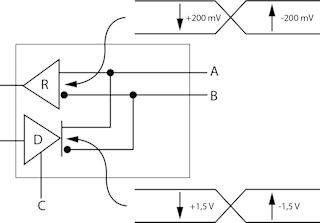

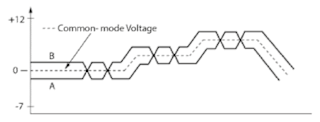
The transfer of data takes place via a differential, serial voltage signal between lines [A] and [B]. Because data is transferred on the lines between sender and receiver, one also refers here to half-duplex or alternating operation. Each receiver or sender has an inverted and a non-inverted connection. The data transfer takes place symmetrically. This means that if one line has a "high" signal then the other has a "low" signal. Line A is therefore complementary to B and vice versa. The advantage of measuring the voltage difference between A and B is that common mode interference has largely no influence. Any common mode interference is coupled on both signal lines approximately equally, and due to the differential measurement it therefore has no influence on the data that is to be transferred.The sender (driver) generates a differential output voltage of at least 1.5 V at 54 Ohm load. The receiver has a sensitivity of +/-200 mV (Fig. Image 2).
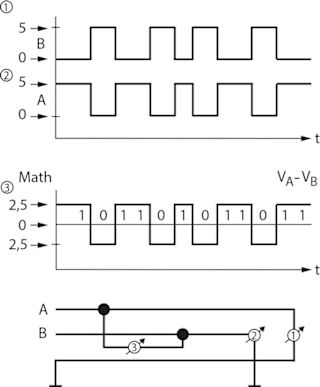

The state logic here is as follows
A–B < 0.25 V= Logic 1 The labelling of connections A / B is often not uniform. What is A with one manufacturer, may be B with the next. Why is this the case? The definition says: A = "-" = T x D- / R x D - = inverted signal Furthermore, a third line "C" = "Common" is also cited. This line is for the reference ground. However, some RS485 chip manufacturers such asTexas Instruments, Maxim, Analog Devices etc. have always used an alternative designation, which has since also become commonplace: A = "+" = T x D + / R x D + = non-inverted signal Due to this confusion, some device manufacturers have introduced their own designations: D+ = "+" = T x D + / R x D + = non-inverted signal Through the [+] and sign after the letter [D] it is clear which line is providing the inverted and the non-inverted signal. Janitza electronics GmbH predominantly uses transceiver ICs from Texas Instruments, Analog Devices or Maxim. For this reason, all of our measuring devices utilise the following designations: A = "+" = T x D + / R x D + = non-inverted signal |
The voltages are defined in the datasheets as follows:
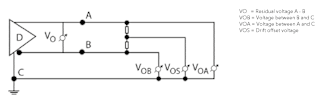
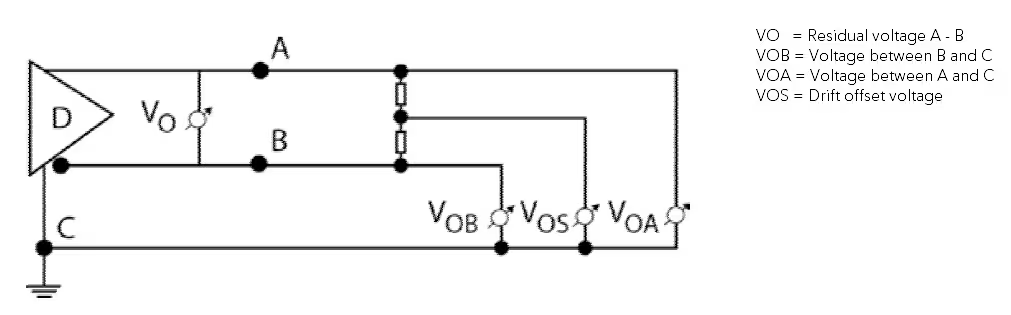
The voltage VCM
The voltage VCM (Common Mode Voltage) is the sum of the GND potential differences between the RS485 participants (Fig.: Image 5), the driver offset voltage and the common mode noise (Vnoise), acting on the bus line. The RS485 driver manufacturers give a voltage range for VCM of -7 to 12 V. With communication problems, this voltage range - resulting from the potential differences between sender and receiver - is frequently impeded if the interface is not galvanically separated by configuration or no common line exists. Image 6 shows the calculation of the common mode voltage.


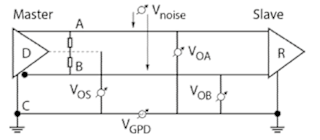


VGPD
VGPD is the potential difference between sender and receiver here GND (PE). Potential differences between the connections (grounding) often arise with larger spatial expansion of the RS485 bus. These potential differences arise in particular with older electrical installations, because no intermeshed potential equalisation exists in many cases. Furthermore, the effects of lightening result in the potential difference between the PE connections in the distribution system approaching hundreds or thousands of volts. It is also possible under normal conditions that potential differences of a few volts may exist due to the equalisation currents of the loads. Vnoise (common mode noise) is an interference voltage that can have the following causes:
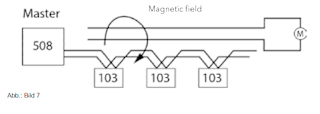
- Interference voltage induced by a magnetic field on the bus line
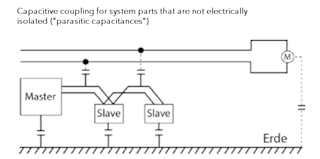
- Capacitive coupling with system parts that are not galvanically separated ("parasitic capacities")
- Galvanic coupling
- Radiant coupling
- Electrostatic discharge


BUs topology
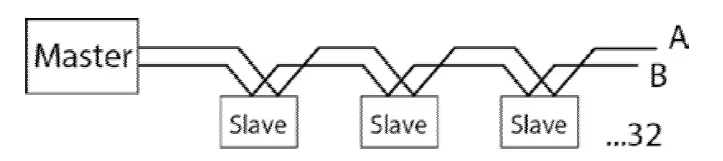
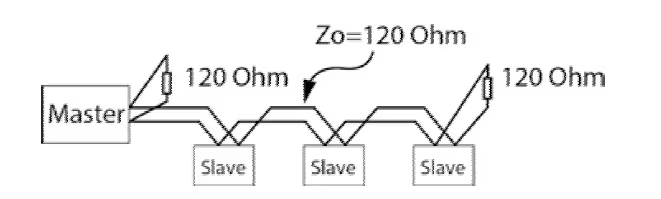
The bus is "multipoint-capable" and it is possible to connect up to 32 participants without a repeater. The best network topology here is the "daisy chain". This means that the bus cable runs directly from slave to slave.
It is necessary to note that stub lines (branches) should be avoided in general. Stub lines cause reflections on the bus. In theory it is feasible to calculate a possible stub line depending on the transceiver used. However, this is complex in practice.The length of a possible stub line is heavily dependent on the signal rise time of the transceiver used and should be less than 1/10 of the signal rise time of the driver. The higher the possible Baud rate of the transceiver, the smaller the signal rise time of the driver.This means one must know which IC has been installed with the bus participants. Furthermore, the signal speed of the cable must also be applied in the calculation. For this reason, one should avoid stub lines in general.
Termination
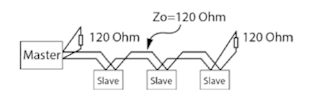
A further cause of communication interruptions are bus reflections. A reflection arises if the sender signal has not been fully absorbed by the load.The source impedance should reflect the load impedance and the line surge impedance, because the full signal power is attained through this and only minimum reflections arise. Serial communication of the RS485 interface functions most efficiently when the source and load impedance are harmonised at 120 Ohm. For this reason, the RS485 standard recommends a bus line with a line surge impedance of Z0 = 120 Ohm. In order that reflections are avoided on the bus, the bus line must be equipped with a termination resistor at the start and end, and this must reflect the line surge impedance.
"Failsafe Bias" resistors
If the receiver inputs fall within the range of -200 mV to + 200 mV, the output of the receiver module is undetermined, i.e. it is not possible for an evaluation of the RS485 signal to take place.
This is the case under the following conditions
- No sender active
- The bus line has been interrupted (e.g. line break)
- The bus line has short circuited (e.g. line damaged, etc.)
Under these conditions the RS485 bus must be brought to a defined signal status. Some communication buses do not have this problem because only one sender exists for example, which controls the line. The sender is either active or inactive. However because the RS485 bus is multipoint-capable, multiple senders can be connected.
In order that the signal status is clear under the aforementioned conditions, one generally uses a "pull up" resistor between +5 V and the signal line A and a "pull down" resistor between GND and signal line B.The resistors can theoretically be placed at an arbitrary point in the bus. However, these are generally used with a master in a potential divider group with termination resistor because readily assembled connectors exist for this purpose.
With some manufacturers one generally only finds a recommendation to install a termination resistor at the start and end, in order that reflections can be avoided (see section on termination or bus configuration UMG 604 with UMG 103). Why is this the case?
In this case the manufacturers have used transceivers for the RS485 interface, which already have an integrated internal Failsafe Bias in the chip, i.e. with 0 V at the receiver input for example, the output automatically has a logical "High" state. With Maxim (as used in the UMG 604 and UMG 103) the function is called "True fail-safe". An external Failsafe Bias then only remains necessary if participants are connected to the same bus, which do not possess this function.The bus load is otherwise unaffected by the "True fail-safe" function.
The "common connection" or "galvanic separation"
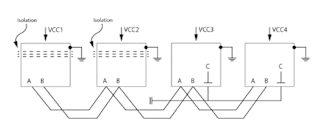
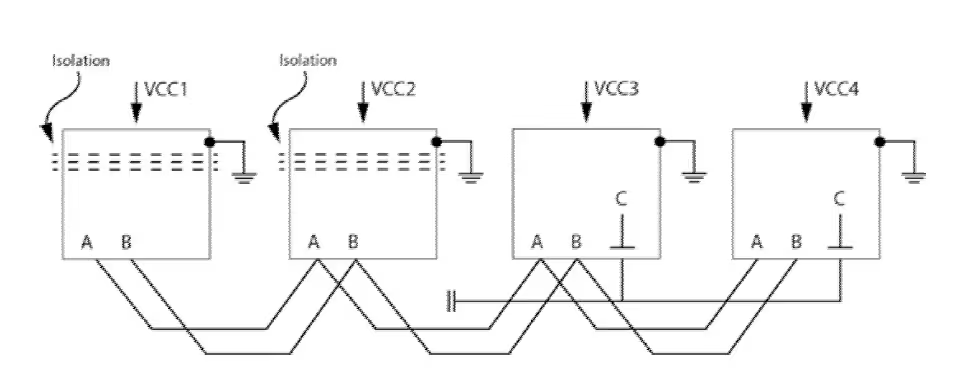
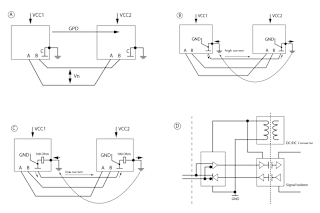
The bus participants generally obtain their supply voltage from different areas of the electrical installation. With older electrical installations in particular, it is therefore possible that considerable potential differences can arise between grounding. However, for fault-free communication the voltage Vcm can only lie within the range of -7 to +12 V, i.e. the voltage VGPD (Ground potential differences) must be as small as possible (image 11 a, image 5). If the RS485 interface is not galvanically separated from the supply voltage then the common connection must be routed with it (image 11 b). However, connection with the common connections may result in a current loop, i.e. without additional measures a higher compensation current will flow between the bus participants and ground. Developers generally prevent this by decoupling the GND of the RS485 interface from the ground with a 100-Ohm resistor (image 11 c).
A better alternative is the galvanic separation of the RS485 interface from the supply voltage through an internal DC/DC converter and a signal isolator. This means that potential differences in the ground have no effect on the signal.The differential signal therefore "floats". Even better still is the galvanic separation of the RS485 interface in combination with a common connection.
Image 12 shows mixed operation between participants of galvanically separated and non-galvanically separated interfaces.The participants with the galvanically separated RS485 have no common connection in the example. In this case it is necessary to ensure that the common connections of the participants are connected with each other. Despite this, communication interferences can arise due to EMC coupling capacitors.This results in the non-galvanically separated participants no longer being able to interpret the signal. In this case the bus must be separated and an additional galvanic coupling must be integrated between the participant circuits.

Note: The screening must never be connected to the common connection of the RS485 interface.This would result in faults being directly coupled with the GND of the RS485 transceiver.